爪抓
Claw Grab
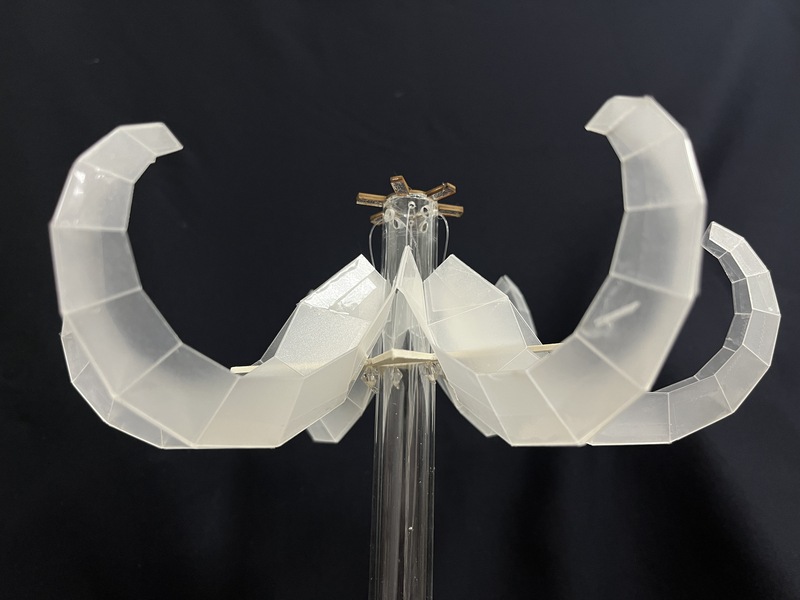
融合仿生造形與互動科技的動態裝置藝術,靈感源自對生物「感知—回應」本能機制的觀察。作品以螺旋結構延伸為具攻防意涵的「爪」形造型,透過多軸結構與伺服馬達的精準驅動,展現如同生命律動般的張力。觀者的聲音將透過感測器與 Arduino 控制核心觸發爪的即時開合,並與 Websim.ai 虛擬模組同步呈現,營造沉浸式的互動體驗。作品不僅是科技與美學的結合,更是一場人與機械的感知對話:當人工智慧與機械裝置具備回應能力時,是否也在重新界定「意識」與「本能」的邊界?《爪抓》邀請觀眾在互動中感受情感、機械與生存意志的相互投射。
This dynamic installation merges bionic form with interactive technology, inspired by observations of living creatures’ instinctive “perception–response” mechanisms. Shaped into a claw-like form with offensive and defensive implications, the spiral structure is driven by multi-axis mechanisms and servo motors, generating a tension that echoes the rhythm of life. Audience voices, captured by sensors and processed through an Arduino control core, trigger the claw’s real-time opening and closing, while synchronizing with a Websim.ai virtual module to create an immersive interactive experience.
More than a fusion of technology and aesthetics, the work stages a sensory dialogue between humans and machines: when artificial intelligence and mechanical devices acquire the ability to respond, do they also begin to redefine the boundary between “consciousness” and “instinct”? Claw Catcher invites viewers to experience the projection of emotion, mechanics, and survival will within this interplay of interaction.
就讀/畢業學校及系級:元智大學藝術與設計學系
School/Department: Department of Art and Design,Yuan Ze University
指導老師:林楚卿 老師
Advisor: Chor-Kheng Lim
團體名稱:twice
Team Name: twice
學生姓名:曾子薰、梁詠媞
Students: TSENG,TZU-HSUN、LIANG,YUNG-TI
作品性質:立體類
Category: Sculpture